
Les pièces du distributeur (corps et vis) sont réalisées à l'imprimante 3D
Le mouvement de la vis lors de la distribution est de +120° suivi de -60° car les croquettes bloquent de temps en temps
La partie opérative est l'élément le plus délicat (et le plus fondamental) de la réalisation). Je n'avais pas prévu au départ la
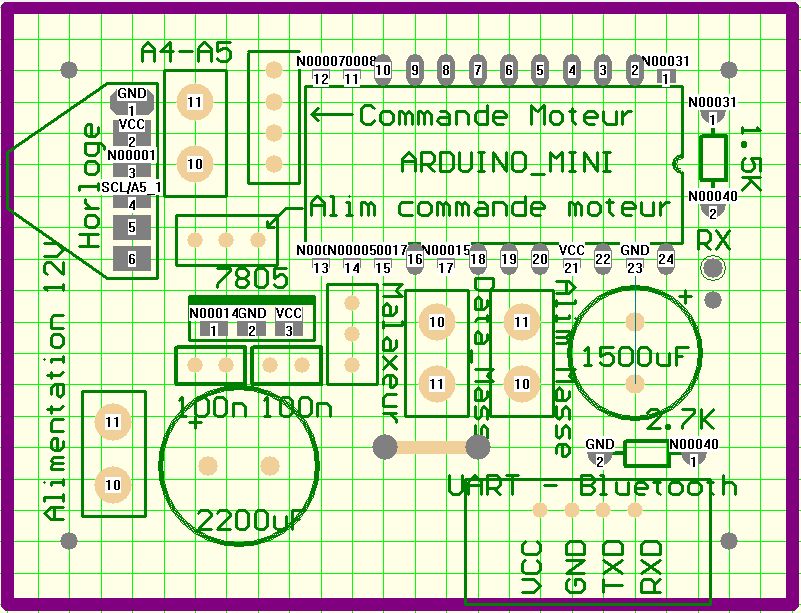
Les circuits imprimés sont réalisés "maison" mais pourraient être réalisés sur des "breadboards" avec des connexions filaires.



Les jauges ont été achetées sur eBay (sinon c'est cher). Il faut 4 jauges montées en pont, alimentées par 5V régulés.
Deux jauges sur la face supérieure de la lame flexible, et deux au dessous.
Cette disposition permet la plus grande sensibilité du montage et diminue les dérives en température puisque toutes les jauges dérivent identiquement.
Il faut découper les jauges deux par deux, les coller (cyanoacrylate) proprement ... souder les fils (très souples) de connexion et les maintenir avec de la colle.




