
Le protocole utilisé par la télécommande est "RC5" de Philips.
On utilisera une librairie spécialement développée par Mr Guy Carpenter pour décoder le signal issu du récepteur Infrarouge.
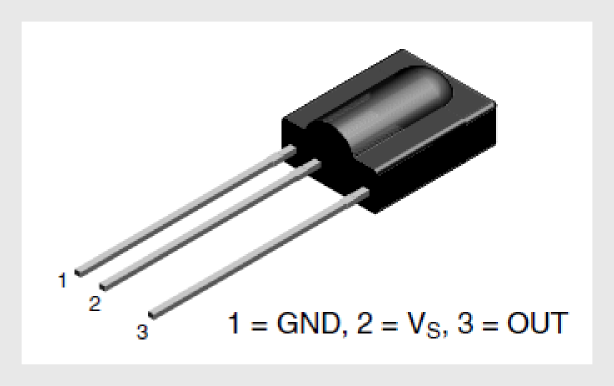
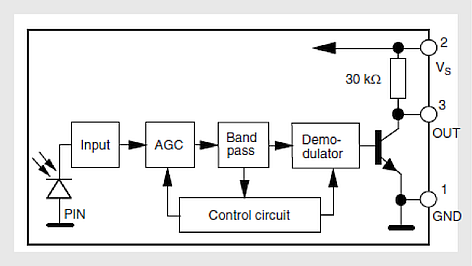
Le
récepteur TSOP1138 assure la réception des impulsions de lumière
infrarouge et fournit un signal binaire séquentiel particulier pour
chaque touche.
L'Arduino devra décoder (à l'aide de la librairie) ce signal pour
retrouver quelle est la touche activée.
Le programme activera ensuite les moteurs selon le choix du programmeur.
Ouvrir l'IDE Arduino, puis menu "Fichier",puis "préférences":

Noter l'emplacement de votre "carnet de croquis":

Avec l'explorateur de fichiers aller dans ce répertoire dans lequel il se trouve un répertoire "libraries" (ainsi que tous les programmes que vous avez créé):

Décompresser
dans le répertoire "libraries" le fichier "RC5-master.zip".
Fermer toutes les
instances de l'IDE Arduino. (Au démarrage le logiciel
"fait l'inventaire" de tous les éléments à sa disposition).
Menu "Fichier", puis "exemples", puis "RC5-master" et enfin le programme de test: "RC5Decode".
Changer la valeur de IR_PIN qui est de 7 à 2, puisque nous avons connecté "OUT" à D2.
Enregistrer le programme modifié dans votre "carnet de croquis".
Lancer le programme et vérifier son bon fonctionnement.